



4. Kernsoftwarefuncties van het gebouwbeheersysteem (BMS)
l Meetfunctie
(1) Basisinformatie meting: bewaking van de batterijspanning, het stroomsignaal en de temperatuur van het batterijpakket. De meest fundamentele functie van het batterijbeheersysteem is het meten van de spanning, stroom en temperatuur van de batterijcellen. Dit vormt de basis voor alle berekeningen en besturingslogica op het hoogste niveau van het batterijbeheersysteem.
(2) Detectie van de isolatieweerstand: Het gehele batterijsysteem en het hoogspanningssysteem moeten door het batterijbeheersysteem op isolatie worden getest.
(3) Hoogspanningsbeveiligingsdetectie (HVIL): wordt gebruikt om de integriteit van het gehele hoogspanningssysteem te bevestigen. Wanneer de integriteit van het hoogspanningssysteemcircuit beschadigd raakt, worden veiligheidsmaatregelen geactiveerd.
lSchattingsfunctie
(1) Schatting van SOC en SOH: het kernonderdeel en het moeilijkste deel
(2) Balanceren: de SOC x capaciteitsonbalans tussen monomeren aanpassen via een balanceringscircuit.
(3) Beperking van het batterijvermogen: het ingangs- en uitgangsvermogen van de batterij zijn beperkt bij verschillende SOC-temperaturen.
lOverige functies
(1) Relaisbesturing: inclusief hoofd +, hoofd-, laadrelais +, laadrelais -, voorlaadrelais
(2) Thermische regeling
(3) Communicatiefunctie
(4) Foutdiagnose en alarm
(5) Fouttolerante werking
5.Kernsoftwarefuncties van het gebouwbeheersysteem (BMS)
lMeetfunctie
(1) Basisinformatie meting: bewaking van de batterijspanning, het stroomsignaal en de temperatuur van het batterijpakket. De meest fundamentele functie van het batterijbeheersysteem is het meten van de spanning, stroom en temperatuur van de batterijcellen. Dit vormt de basis voor alle berekeningen en besturingslogica op het hoogste niveau van het batterijbeheersysteem.
(2) Detectie van de isolatieweerstand: Het gehele batterijsysteem en het hoogspanningssysteem moeten door het batterijbeheersysteem op isolatie worden getest.
(3) Hoogspanningsbeveiligingsdetectie (HVIL): wordt gebruikt om de integriteit van het gehele hoogspanningssysteem te bevestigen. Wanneer de integriteit van het hoogspanningssysteemcircuit beschadigd raakt, worden veiligheidsmaatregelen geactiveerd.
lSchattingsfunctie
(1) Schatting van SOC en SOH: het kernonderdeel en het moeilijkste deel
(2) Balanceren: de SOC x capaciteitsonbalans tussen monomeren aanpassen via een balanceringscircuit.
(3) Beperking van het batterijvermogen: het ingangs- en uitgangsvermogen van de batterij zijn beperkt bij verschillende SOC-temperaturen.
lOverige functies
(1) Relaisbesturing: inclusief hoofd +, hoofd-, laadrelais +, laadrelais -, voorlaadrelais
(2) Thermische regeling
(3) Communicatiefunctie
(4) Foutdiagnose en alarm
(5) Fouttolerante werking
6.BMS-softwarearchitectuur
lHoog- en laagspanningsbeheer
Wanneer het apparaat normaal is ingeschakeld, wordt het BMS geactiveerd door de VCU via een vaste lijn of een CAN-signaal van 12V. Nadat het BMS de zelfcontrole heeft voltooid en in de stand-bymodus is gegaan, stuurt de VCU een hoogspanningscommando en stuurt het BMS het sluiten van het relais aan om de hoogspanningsverbinding tot stand te brengen. Wanneer het apparaat is uitgeschakeld, stuurt de VCU een laagspanningscommando en verbreekt vervolgens de 12V-activeringsverbinding. Wanneer het pistool in de uitgeschakelde stand wordt geplaatst om te laden, kan het worden geactiveerd door het CP- of A+-signaal.
lOplaadbeheer
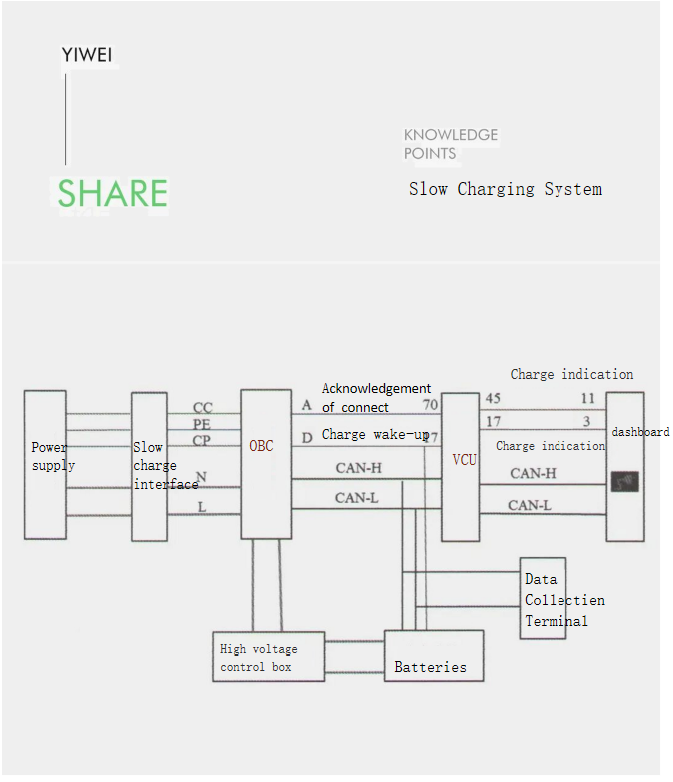
(1) Langzaam opladen
Langzaam opladen houdt in dat de batterij wordt opgeladen met gelijkstroom, omgezet vanuit wisselstroom door de ingebouwde lader van het laadstation (of een 220V-voeding). De specificaties van laadstations zijn over het algemeen 16A, 32A en 64A, en opladen via een huishoudelijk stopcontact is ook mogelijk. Het batterijbeheersysteem (BMS) kan worden geactiveerd door het CC- of CP-signaal, maar moet ervoor zorgen dat het na het opladen weer normaal in slaapstand kan gaan. Het AC-laadproces is relatief eenvoudig en kan worden ontwikkeld volgens gedetailleerde nationale normen.
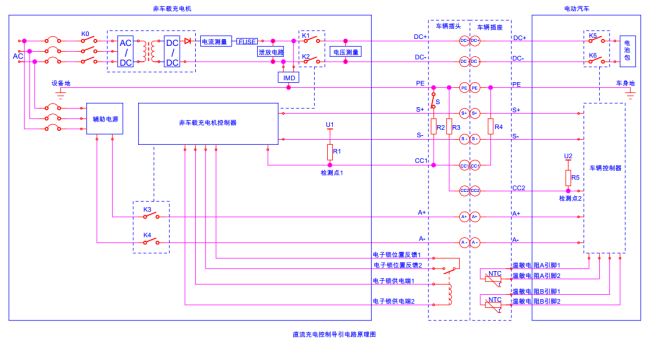
(2) Snel opladen
Snelladen houdt in dat de batterij wordt opgeladen met gelijkstroom via het DC-laadstation, waarmee een laadsnelheid van 1C of zelfs hoger kan worden bereikt. Over het algemeen kan de batterij in 45 minuten voor 80% worden opgeladen. Het laadstation kan worden geactiveerd door het A+-signaal van de hulpvoeding van het laadstation.
lSchattingsfunctie
(1) SOP (State of Power) verkrijgt hoofdzakelijk het beschikbare laad- en ontlaadvermogen van de batterij door middel van tabellen met temperatuur en SOC. De VCU bepaalt hoe het hele voertuig wordt gebruikt op basis van de verzonden vermogenswaarde.
(2) SOH (State of Health) karakteriseert voornamelijk de huidige gezondheidstoestand van de batterij, met een waarde tussen 0 en 100%. Over het algemeen wordt aangenomen dat de batterij niet meer gebruikt kan worden wanneer het SOH-niveau onder de 80% zakt.
(3) SOC (State of Charge) behoort tot het kernbesturingsalgoritme van het BMS, dat de huidige resterende capaciteitsstatus karakteriseert. Het is hoofdzakelijk gebaseerd op de ampère-uurintegratiemethode en het EKF-algoritme (extended Kalman filter), gecombineerd met correctiestrategieën (zoals correctie van de open-circuitspanning, correctie van volledige lading, correctie van het einde van de lading, capaciteitscorrectie bij verschillende temperaturen en SOH, enz.).
(4) Het SOE-algoritme (State of Energy) wordt niet op grote schaal door binnenlandse fabrikanten ontwikkeld of maakt gebruik van relatief eenvoudige algoritmen om de verhouding te verkrijgen tussen de resterende energie in de huidige toestand en de maximaal beschikbare energie. Deze functie wordt voornamelijk gebruikt voor het schatten van het resterende vliegbereik.
lFoutdiagnose
Er worden verschillende foutniveaus onderscheiden op basis van de verschillende prestaties van de batterij. Het batterijbeheersysteem (BMS) en de spanningsregelaar (VCU) nemen bij verschillende foutniveaus verschillende verwerkingsmaatregelen, zoals waarschuwingen, vermogensbeperking of directe uitschakeling van de hoogspanning. Fouten omvatten onder andere data-acquisitie- en rationaliteitsfouten, elektrische fouten (sensoren en actuatoren), communicatiefouten en batterijstatusfouten.
1.Kernsoftwarefuncties van het gebouwbeheersysteem (BMS)
lMeetfunctie
(1) Basisinformatie meting: bewaking van de batterijspanning, het stroomsignaal en de temperatuur van het batterijpakket. De meest fundamentele functie van het batterijbeheersysteem is het meten van de spanning, stroom en temperatuur van de batterijcellen. Dit vormt de basis voor alle berekeningen en besturingslogica op het hoogste niveau van het batterijbeheersysteem.
(2) Detectie van de isolatieweerstand: Het gehele batterijsysteem en het hoogspanningssysteem moeten door het batterijbeheersysteem op isolatie worden getest.
(3) Hoogspanningsbeveiligingsdetectie (HVIL): wordt gebruikt om de integriteit van het gehele hoogspanningssysteem te bevestigen. Wanneer de integriteit van het hoogspanningssysteemcircuit beschadigd raakt, worden veiligheidsmaatregelen geactiveerd.
lSchattingsfunctie
(1) Schatting van SOC en SOH: het kernonderdeel en het moeilijkste deel
(2) Balanceren: de SOC x capaciteitsonbalans tussen monomeren aanpassen via een balanceringscircuit.
(3) Beperking van het batterijvermogen: het ingangs- en uitgangsvermogen van de batterij zijn beperkt bij verschillende SOC-temperaturen.
lOverige functies
(1) Relaisbesturing: inclusief hoofd +, hoofd-, laadrelais +, laadrelais -, voorlaadrelais
(2) Thermische regeling
(3) Communicatiefunctie
(4) Foutdiagnose en alarm
(5) Fouttolerante werking
2.BMS-softwarearchitectuur
lHoog- en laagspanningsbeheer
Wanneer het apparaat normaal is ingeschakeld, wordt het BMS geactiveerd door de VCU via een vaste lijn of een CAN-signaal van 12V. Nadat het BMS de zelfcontrole heeft voltooid en in de stand-bymodus is gegaan, stuurt de VCU een hoogspanningscommando en stuurt het BMS het sluiten van het relais aan om de hoogspanningsverbinding tot stand te brengen. Wanneer het apparaat is uitgeschakeld, stuurt de VCU een laagspanningscommando en verbreekt vervolgens de 12V-activeringsverbinding. Wanneer het pistool in de uitgeschakelde stand wordt geplaatst om te laden, kan het worden geactiveerd door het CP- of A+-signaal.
lOplaadbeheer
(1) Langzaam opladen
Langzaam opladen houdt in dat de batterij wordt opgeladen met gelijkstroom, omgezet vanuit wisselstroom door de ingebouwde lader van het laadstation (of een 220V-voeding). De specificaties van laadstations zijn over het algemeen 16A, 32A en 64A, en opladen via een huishoudelijk stopcontact is ook mogelijk. Het batterijbeheersysteem (BMS) kan worden geactiveerd door het CC- of CP-signaal, maar moet ervoor zorgen dat het na het opladen weer normaal in slaapstand kan gaan. Het AC-laadproces is relatief eenvoudig en kan worden ontwikkeld volgens gedetailleerde nationale normen.
(2) Snel opladen
Snelladen houdt in dat de batterij wordt opgeladen met gelijkstroom via het DC-laadstation, waarmee een laadsnelheid van 1C of zelfs hoger kan worden bereikt. Over het algemeen kan de batterij in 45 minuten voor 80% worden opgeladen. Het laadstation kan worden geactiveerd door het A+-signaal van de hulpvoeding van het laadstation.
lSchattingsfunctie
(1) SOP (State of Power) verkrijgt hoofdzakelijk het beschikbare laad- en ontlaadvermogen van de batterij door middel van tabellen met temperatuur en SOC. De VCU bepaalt hoe het hele voertuig wordt gebruikt op basis van de verzonden vermogenswaarde.
(2) SOH (State of Health) karakteriseert voornamelijk de huidige gezondheidstoestand van de batterij, met een waarde tussen 0 en 100%. Over het algemeen wordt aangenomen dat de batterij niet meer gebruikt kan worden wanneer het SOH-niveau onder de 80% zakt.
(3) SOC (State of Charge) behoort tot het kernbesturingsalgoritme van het BMS, dat de huidige resterende capaciteitsstatus karakteriseert. Het is hoofdzakelijk gebaseerd op de ampère-uurintegratiemethode en het EKF-algoritme (extended Kalman filter), gecombineerd met correctiestrategieën (zoals correctie van de open-circuitspanning, correctie van volledige lading, correctie van het einde van de lading, capaciteitscorrectie bij verschillende temperaturen en SOH, enz.).
(4) Het SOE-algoritme (State of Energy) wordt niet op grote schaal door binnenlandse fabrikanten ontwikkeld of maakt gebruik van relatief eenvoudige algoritmen om de verhouding te verkrijgen tussen de resterende energie in de huidige toestand en de maximaal beschikbare energie. Deze functie wordt voornamelijk gebruikt voor het schatten van het resterende vliegbereik.
lFoutdiagnose
Er worden verschillende foutniveaus onderscheiden op basis van de verschillende prestaties van de batterij. Het batterijbeheersysteem (BMS) en de spanningsregelaar (VCU) nemen bij verschillende foutniveaus verschillende verwerkingsmaatregelen, zoals waarschuwingen, vermogensbeperking of directe uitschakeling van de hoogspanning. Fouten omvatten onder andere data-acquisitie- en rationaliteitsfouten, elektrische fouten (sensoren en actuatoren), communicatiefouten en batterijstatusfouten.
Neem contact met ons op:
yanjing@1vtruck.com +(86)13921093681
duanqianyun@1vtruck.com +(86)13060058315
liyan@1vtruck.com +(86)18200390258
Geplaatst op: 12 mei 2023



